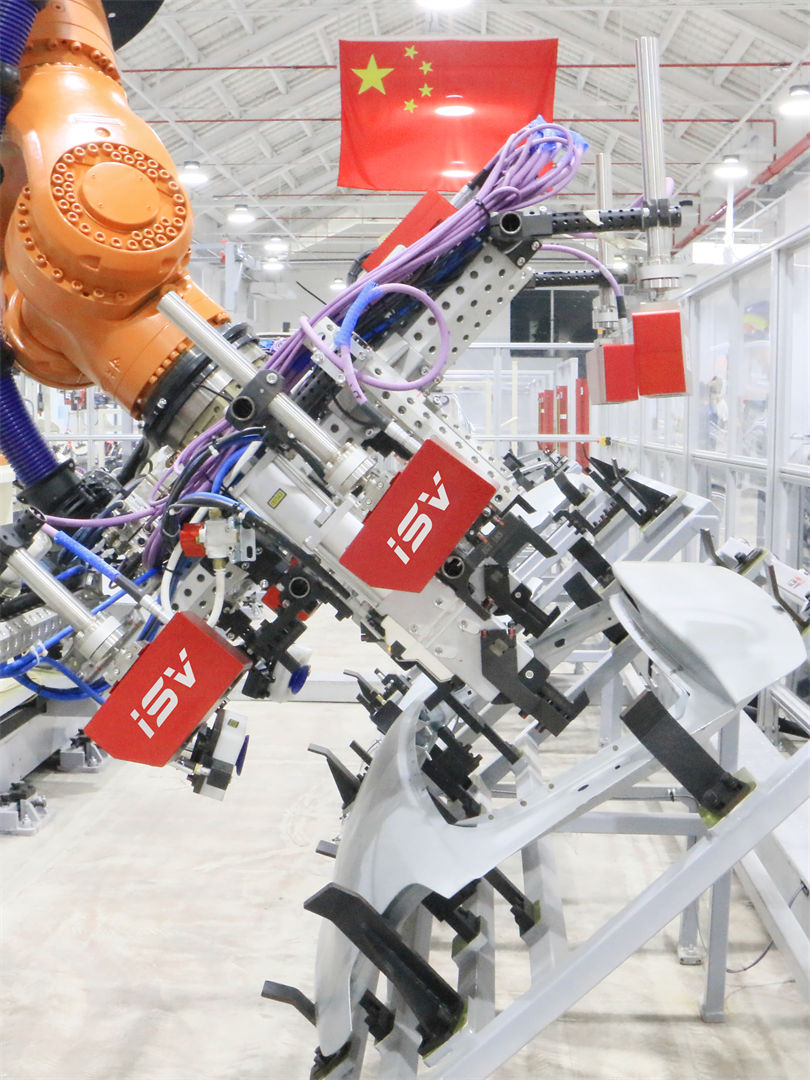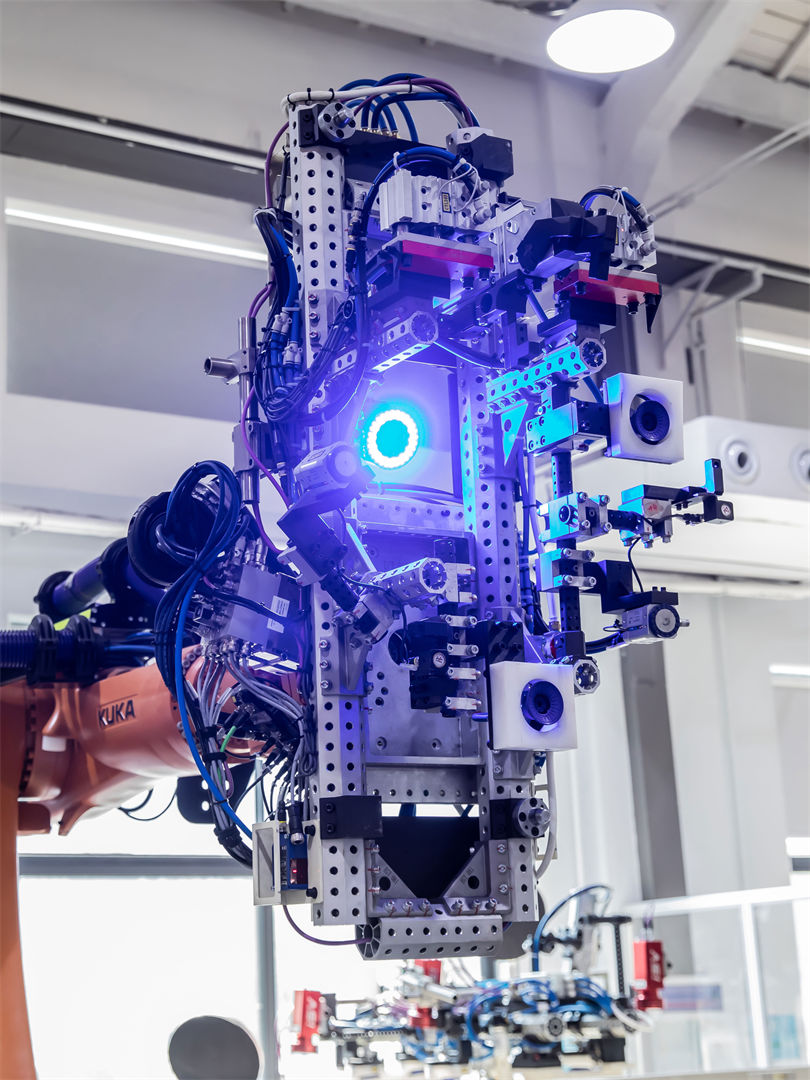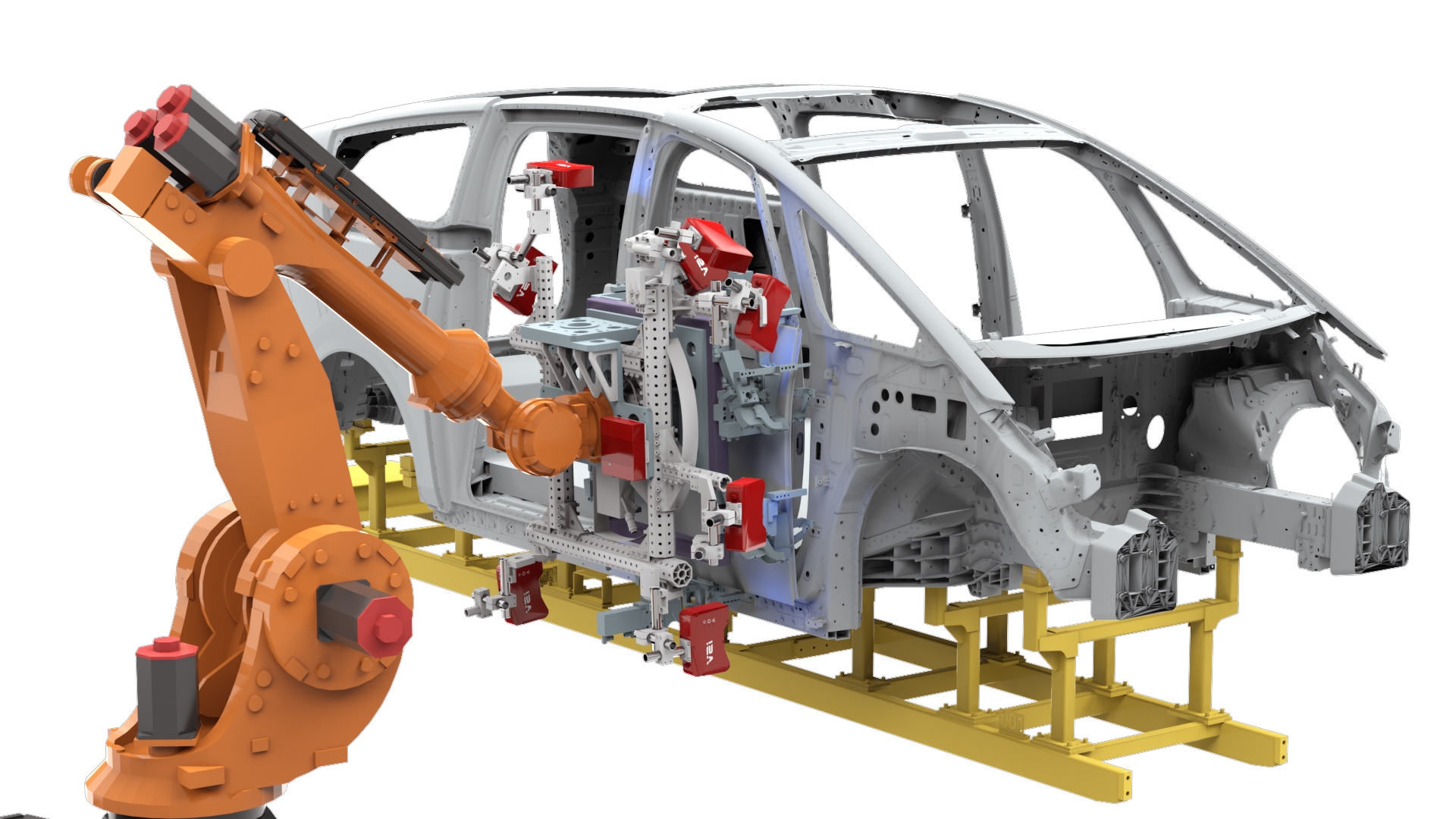
[Công nghệ hướng dẫn thị giác tự động cho quy trình lắp ráp đã được phát triển dựa trên công nghệ đo lường đặc điểm 3D và kỹ thuật khớp tối ưu. Hệ thống này có khả năng tính toán vị trí lắp ráp tốt nhất giữa các chi tiết ngoại thất của thân xe và thân xenhan dinh keo hom nay, đồng thời điều khiển robot hoàn thành quy trình lắp ráp một cách chính xác. Phương án này đã thay thế mô hình lắp ráp truyền thống dựa trên con người và dụng cụ lắp ráp. Với giải pháp này, khách hàng không chỉ giảm thiểu đáng kể chi phí nhân công đắt đỏ tại dây chuyền điều chỉnh mà còn đạt được quá trình lắp ráp số hóa, đảm bảo độ ổn định trong kết quả lắp ráp.
- Trang chủ
- Giới thiệu về chúng tôi
-
Giải pháp ngành
<div class="redline"></div> <h5><a href="/h2r98498.html">Trung tâm sản phẩm</a></h5>

- Lĩnh vực ứng dụng
- <a href="/xbqibwd6.html">Tuyển dụng nhân tài</a> <a href="/xbqibwd6.html" onclick="open_job_link()">Tuyển dụng nhân tài</a> Tuyển dụng nhân tài <div class="navlist navlist2"> <div class="width1170"> <div class="L"> <div class="redline"></div> <h5><a href="/xbqibwd6.html">Tuyển dụng nhân tài</a></h5> <h5> <a href="/xbqibwd6.html" onclick="open_job_link()">Tuyển dụng nhân tài</a></h5> <h5><a href="https://isv-tech.zhiye.com/">Tuyển dụng nhân tài</a></h5> <div class="navlistimg"> <img alt="" src="/jpg/0mklthh6.jpg"/> </div> </div> <div class="R"> <div class="navbox"> <ul> <li><a href="/xbqibwd6.html">Tuyển sinh đại học</a></li> <li><a href="/portal/list/index/id/229.html">Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi văn hóa</a></li> </ul> <ul> <li><a href="https://isv-tech.zhiye.com/Campus" >Tuyển sinh đại học</a></li> <li><a href="https://isv-tech.zhiye.com/Social" >Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi văn hóa</a></li> </ul> <ul> <li><a href="/xbqibwd6.html" onclick="open_job_link1()">Tuyển sinh đại học</a></li> <li><a href="/portal/list/index/id/229.html" onclick="open_job_link2()">Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi văn hóa</a></li> </ul> </div> </div> </div> </div>
- Liên hệ với chúng tôi