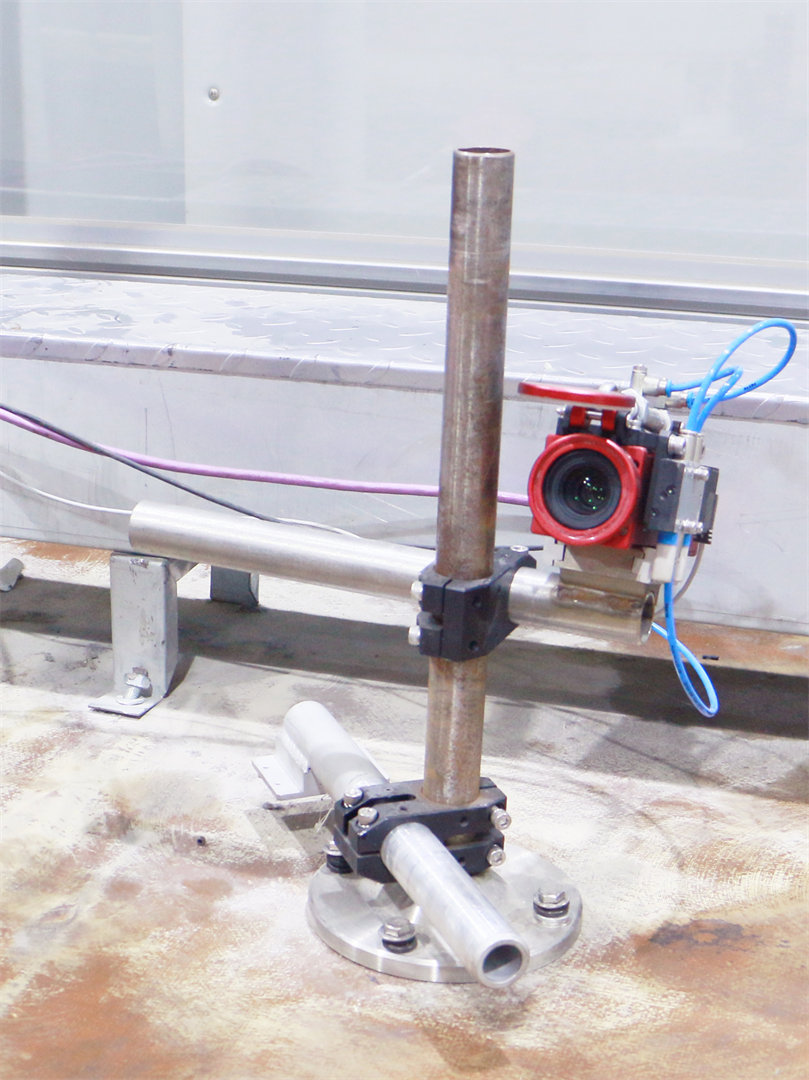
Trong quá trình định vị và hàn sửabắn cá 3d, chúng tôi sử dụng giải pháp dẫn đường thị giác bằng cách thu thập các đặc trưng hình ảnh của thân xe thông qua nhiều cảm biến. Từ đó, chúng tôi tính toán sự thay đổi vị trí theo sáu bậc tự do trong không gian của thân xe, từ đó hướng dẫn robot điều chỉnh quỹ đạo để thực hiện quá trình hàn sửa mà không cần kẹp cố định. Giải pháp này không chỉ giúp khách hàng tiết kiệm chi phí đầu tư cho các thiết bị nâng hạ và kẹp cố định mà còn cải thiện đáng kể tốc độ tại vị trí làm việc cũng như rút ngắn thời gian thử nghiệm và điều chỉnh khi ra mắt mẫu xe mới.
- Trang chủ
- Giới thiệu về chúng tôi
-
Giải pháp ngành
<div class="redline"></div> <h5><a href="/h2r98498.html">Trung tâm sản phẩm</a></h5>

- Lĩnh vực ứng dụng
- <a href="/xbqibwd6.html">Tuyển dụng nhân tài</a> <a href="/xbqibwd6.html" onclick="open_job_link()">Tuyển dụng nhân tài</a> Tuyển dụng nhân tài <div class="navlist navlist2"> <div class="width1170"> <div class="L"> <div class="redline"></div> <h5><a href="/xbqibwd6.html">Tuyển dụng nhân tài</a></h5> <h5> <a href="/xbqibwd6.html" onclick="open_job_link()">Tuyển dụng nhân tài</a></h5> <h5><a href="https://isv-tech.zhiye.com/">Tuyển dụng nhân tài</a></h5> <div class="navlistimg"> <img alt="" src="/jpg/0mklthh6.jpg"/> </div> </div> <div class="R"> <div class="navbox"> <ul> <li><a href="/xbqibwd6.html">Tuyển sinh đại học</a></li> <li><a href="/portal/list/index/id/229.html">Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi văn hóa</a></li> </ul> <ul> <li><a href="https://isv-tech.zhiye.com/Campus" >Tuyển sinh đại học</a></li> <li><a href="https://isv-tech.zhiye.com/Social" >Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi văn hóa</a></li> </ul> <ul> <li><a href="/xbqibwd6.html" onclick="open_job_link1()">Tuyển sinh đại học</a></li> <li><a href="/portal/list/index/id/229.html" onclick="open_job_link2()">Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi văn hóa</a></li> </ul> </div> </div> </div> </div>
- Liên hệ với chúng tôi