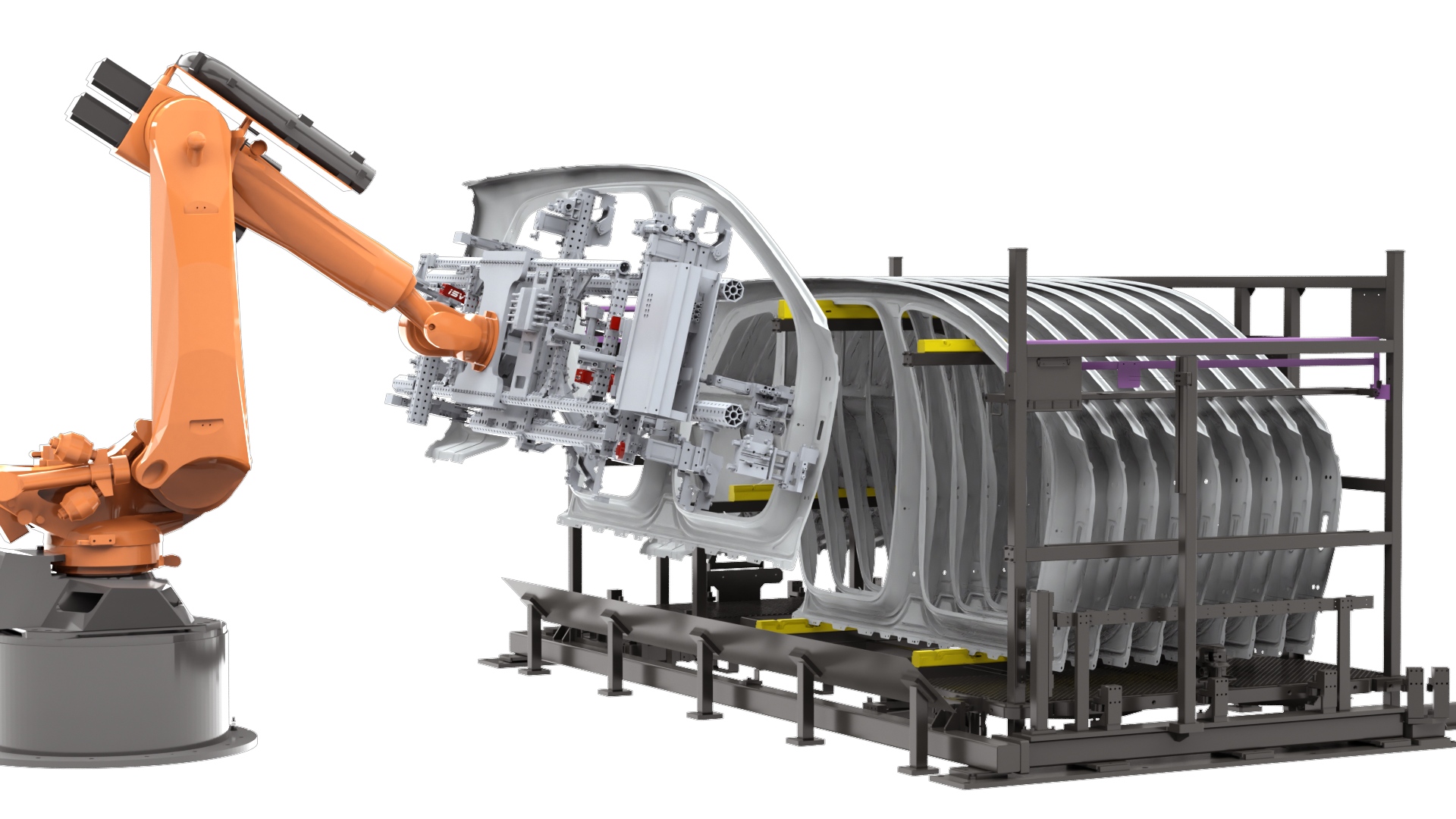
Trong phương án vận chuyển và cấp liệu được hướng dẫn bằng hình ảnhca cuoc the thao, chúng tôi đã kết hợp nhiều công nghệ khác nhau như định vị dựa trên nhiều đặc điểm của hình ảnh và khớp điểm 3D từ điểm mây để giúp robot có khả năng tự động điều chỉnh quỹ đạo và lấy chi tiết từ các thiết bị chứa. Giải pháp này không chỉ thay thế mô hình vận chuyển thủ công truyền thống mà còn giảm thiểu yêu cầu về độ phức tạp trong thiết kế các thiết bị chứa, đồng thời cắt giảm chi phí nhân công, mang lại hiệu quả kinh tế cao hơn.
- Trang chủ
- Giới thiệu về chúng tôi
-
Giải pháp ngành
<div class="redline"></div> <h5><a href="/h2r98498.html">Trung tâm sản phẩm</a></h5>

- Lĩnh vực ứng dụng
- <a href="/xbqibwd6.html">Tuyển dụng nhân tài</a> <a href="/xbqibwd6.html" onclick="open_job_link()">Tuyển dụng nhân tài</a> Tuyển dụng nhân tài <div class="navlist navlist2"> <div class="width1170"> <div class="L"> <div class="redline"></div> <h5><a href="/xbqibwd6.html">Tuyển dụng nhân tài</a></h5> <h5> <a href="/xbqibwd6.html" onclick="open_job_link()">Tuyển dụng nhân tài</a></h5> <h5><a href="https://isv-tech.zhiye.com/">Tuyển dụng nhân tài</a></h5> <div class="navlistimg"> <img alt="" src="/jpg/0mklthh6.jpg"/> </div> </div> <div class="R"> <div class="navbox"> <ul> <li><a href="/xbqibwd6.html">Tuyển sinh đại học</a></li> <li><a href="/portal/list/index/id/229.html">Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi văn hóa</a></li> </ul> <ul> <li><a href="https://isv-tech.zhiye.com/Campus" >Tuyển sinh đại học</a></li> <li><a href="https://isv-tech.zhiye.com/Social" >Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi văn hóa</a></li> </ul> <ul> <li><a href="/xbqibwd6.html" onclick="open_job_link1()">Tuyển sinh đại học</a></li> <li><a href="/portal/list/index/id/229.html" onclick="open_job_link2()">Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi văn hóa</a></li> </ul> </div> </div> </div> </div>
- Liên hệ với chúng tôi